
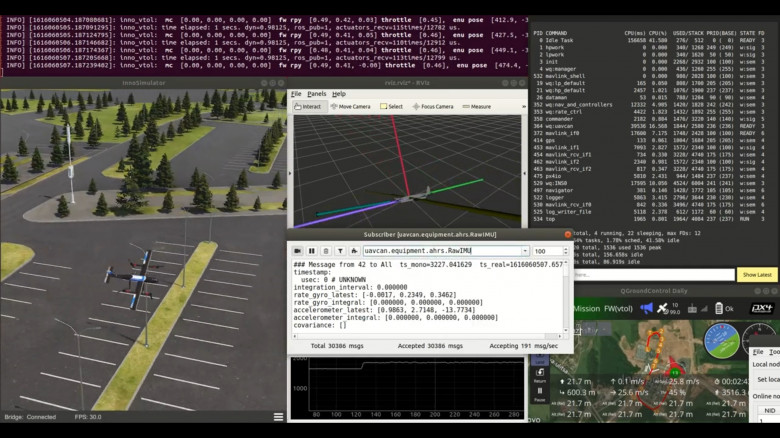
Hi from RaccoonLab, a team of enthusiasts in field robotics! We want to share our true-HITL UAVCAN-based simulator for PX4.
We believe a unified UAVCAN bus for drone onboard electronics will become a mainstream approach shortly. Our simulator is already based on UAVCAN (in opposition to UART-MAVLINK) and emulates exactly the same messages as real UAVCAN-sensors.

