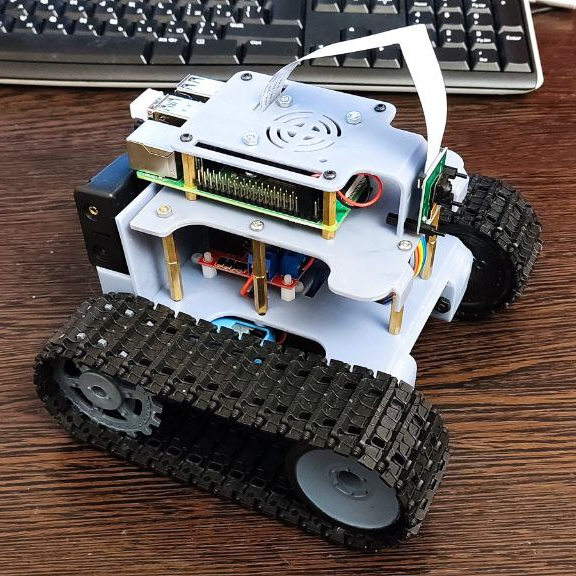
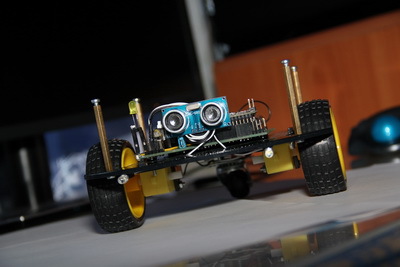
Предлагается сделать домашнего робота, отличительными чертами которого будут:
— относительная простота создания (как по времени, так и трудозатратам),
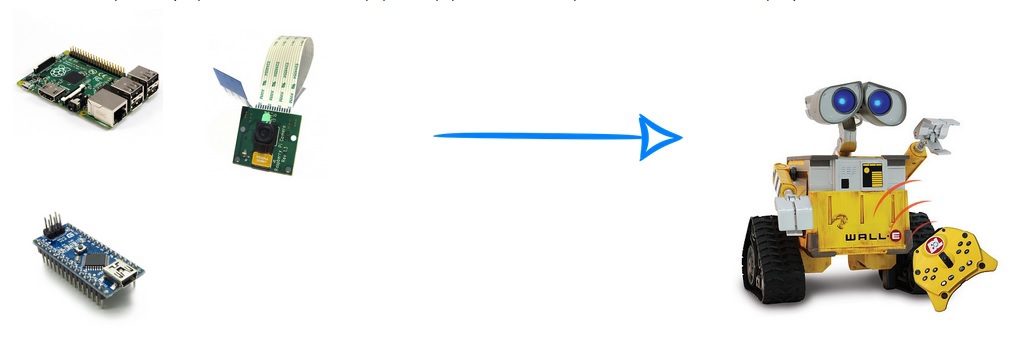
— недорогие комплектующие,
— доступный софт,
— возможность удаленного управления, в том числе через интернет,
— возможность бесшумно передвигаться,
— наличие веб-камеры, которая (которой):
> вещает в сеть
> можно удаленно управлять(поворотная камера по осям x и y, pan-tilt)
> имеет возможность фото-, видео- съемки с сохранением на диск и скачивания данных медиа
> можно управлять настройками (экспозиция, баланс и т.п.)
> поддерживает день|ночь
> может сохранять снимки при наличии движения (motion detection).
— возможность управлять режимом работы для экономии батареи, в том числе пробуждаться и засыпать, контролировать заряд батареи.